About Robotic Inspection Crawler for Small Diameter Complex Piping:
This project presents an innovative robotic crawler designed to inspect small and complex-diameter pipes, addressing critical challenges in industrial maintenance and safety. Developed as a Senior Design project during the 2022/23 academic year by three undergraduate students from the Electrical Engineering Department, the prototype aims to enhance inspection efficiency, reduce operational risks, and lower maintenance costs.
The crawler was engineered to navigate intricate piping systems with high flexibility and precision. Its intelligent mechanical design allows it to maneuver through tight bends and varying pipe diameters, making it suitable for environments that are otherwise inaccessible or hazardous to human workers. The system is equipped with advanced imaging and sensor technologies capable of detecting corrosion, cracks, and structural anomalies with high accuracy.
A key innovation lies in its remote-control capability, which enables real-time monitoring and adaptive path control. This feature not only improves inspection accuracy but also enhances operator safety by eliminating the need for direct human intervention in dangerous environments.
The methodology involved iterative mechanical design, embedded system integration, and sensor calibration. The team employed a modular approach to allow future scalability and ease of maintenance.
Scientific or Technical Area:
Electrical Engineering
Project Timeline:
September 2022 - May 2023
Main Objectives of the Project:
-
Flexible Mobility: An intelligent design that allows smooth navigation through complex piping systems.
-
Accurate Inspection: Equipped with advanced cameras and sensors to detect corrosion and cracks precisely.
-
Remote Control: A sophisticated control system enabling real-time monitoring and efficient path adjustment.
-
Maintenance Efficiency: Reducing time and cost compared to traditional methods.
-
Enhanced Safety: Performing inspections in hazardous environments without exposing workers to danger.
Anticipated Impact and Relevance:
This student-led project contributes to scientific advancement by integrating robotics, sensor technology, and intelligent control systems to develop a robotic crawler capable of inspecting small and complex-diameter pipes with high precision. It addresses societal and environmental needs by enhancing safety in hazardous industrial environments, reducing inspection time and costs, and enabling early detection of structural issues that could lead to environmental damage. Aligned with Qatar National Vision 2030, the project supports human development through hands-on engineering education, promotes economic diversification by fostering innovation in industrial automation, and contributes to environmental sustainability through preventive maintenance solutions. As a product of undergraduate research, it exemplifies youth-led innovation, encouraging technical creativity and problem-solving among students while demonstrating the potential of academic projects to deliver impactful, real-world solutions.
Supervisor(s) Details:
-
Full Name: Prof. Nader Meskin
-
Job Title/Position: Professor
-
Department or Unit: Electrical Engineering
-
Institution/Affiliation:
Qatar University
-
Email Address: nader.meskin@qu.edu.qa
Team Members Involved:
- Jana Sheikh Ali, Senior Undergraduate student, Qatar University
- Nourhan Ibrahim, Senior Undergraduate student, Qatar University
- Aysha Habash, Senior Undergraduate student, Qatar University
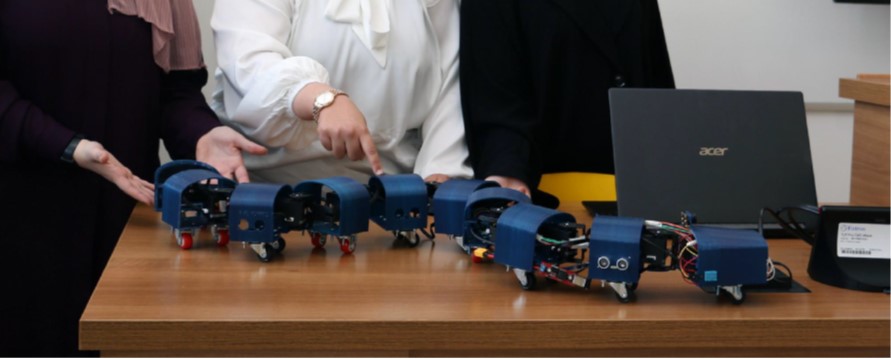
Picture of the Prototype:
Video:
Video Link